Side Projects
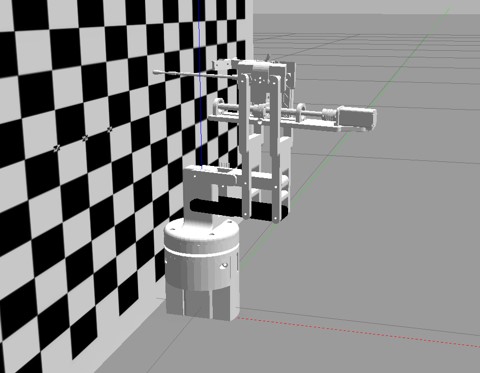
Automatic Specimen-Collecting Robot with RCM Mechanism
This is an extended project from RMMl lab. I intend to build a fully automatic specimen-collecting robot and try to spawn this robot in a virtual world with the Gazebo simulator. It is a proof-of-concept project. By clicking on the screen, the tip of the cotton rod will arrive at where you clicked.
My Website
Building and owning a personal space on my own which can display what I am interested in, what I have done, and what kind of a person I am has been a dream since I was a freshman. That's why I spend about four months building this website from learning basic front-end knowledge. It really brings me a lot of sense of achievement.

UAV Precision Landing with Fiducial Marker
The PX4 official simulation package provides an off-the-shelf precision landing function. However, there are some limitations, such as the limited FOV (35 deg) and detected range (15 m). To work around this issue, I took advantage of the existing px4 message "landing_target_raw" and "Precision Land" mode by transmitting the relative position between the UAV and the marker to the ros topic "/mavros/landing_target/raw" to achieve the precision landing function. On the other hand, I made a VTOL supporting frame in this project to avoid contact between standard_vtol and the ground. Unfortunately, the PR didn't pass and I plan to reopen it in the future.
2nd Year

Q-DRIVE: Quadrupedal Deep Reinforcement for Intelligent Versatile Execution
In this work, we introduce a hierarchical reinforcement learning framework for pedipulation---using a quadruped's legs for manipulation tasks. Our approach comprises a high-level policy that dynamically selects which leg to use, and a low-level policy that learns precise foot control, including stable contact force when interacting with rigid objects. By combining these two levels of control, we significantly reduce execution time when tasks (e.g., pressing a button) appear on different sides, while maintaining robust balance and accuracy. Crucially, we propose a novel reward design that encourages both reaching the target point and applying the correct contact force to ensure successful and safe manipulation. Simulation results show that our hierarchical method outperforms single-limb approaches in both efficiency and fine-force control, demonstrating the feasibility of using multiple legs for rapid, precise, and stable interactions in dynamic environments.
1st Year
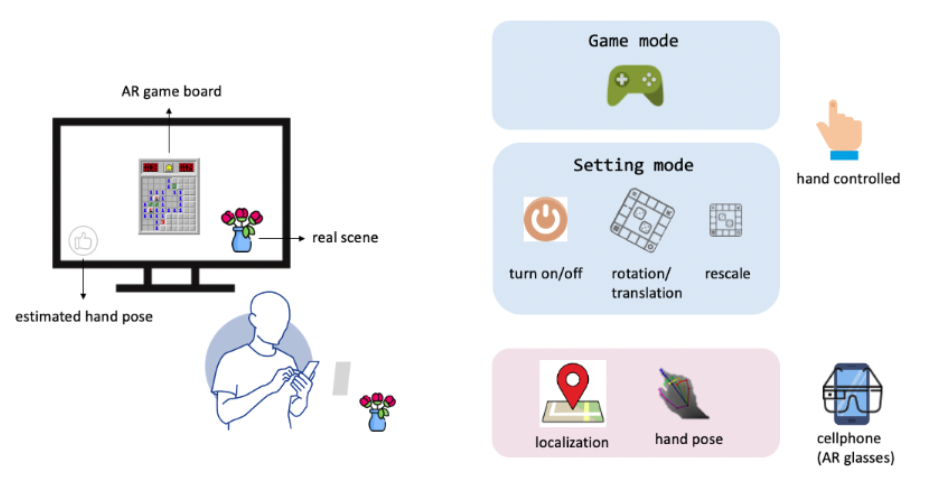
AR Vision: Immersive Entertainment through Virtual Devices
To develop a system resembling the Apple Vision Pro, we use a cellphone to simulate AR glasses and a computer to show what the user sees. In addition to presenting the real scene, the computer will also show the game board. The game board is fixed in a virtual location, so its position on the screen varies as the player moves. We implement the Minesweeper as the game board in our project. All actions can be performed through gestures. Our system supports two modes: the game mode, where the player can play the game, and the setting mode, where he or she can adjust the scale or the position of the board.
5th-Grade
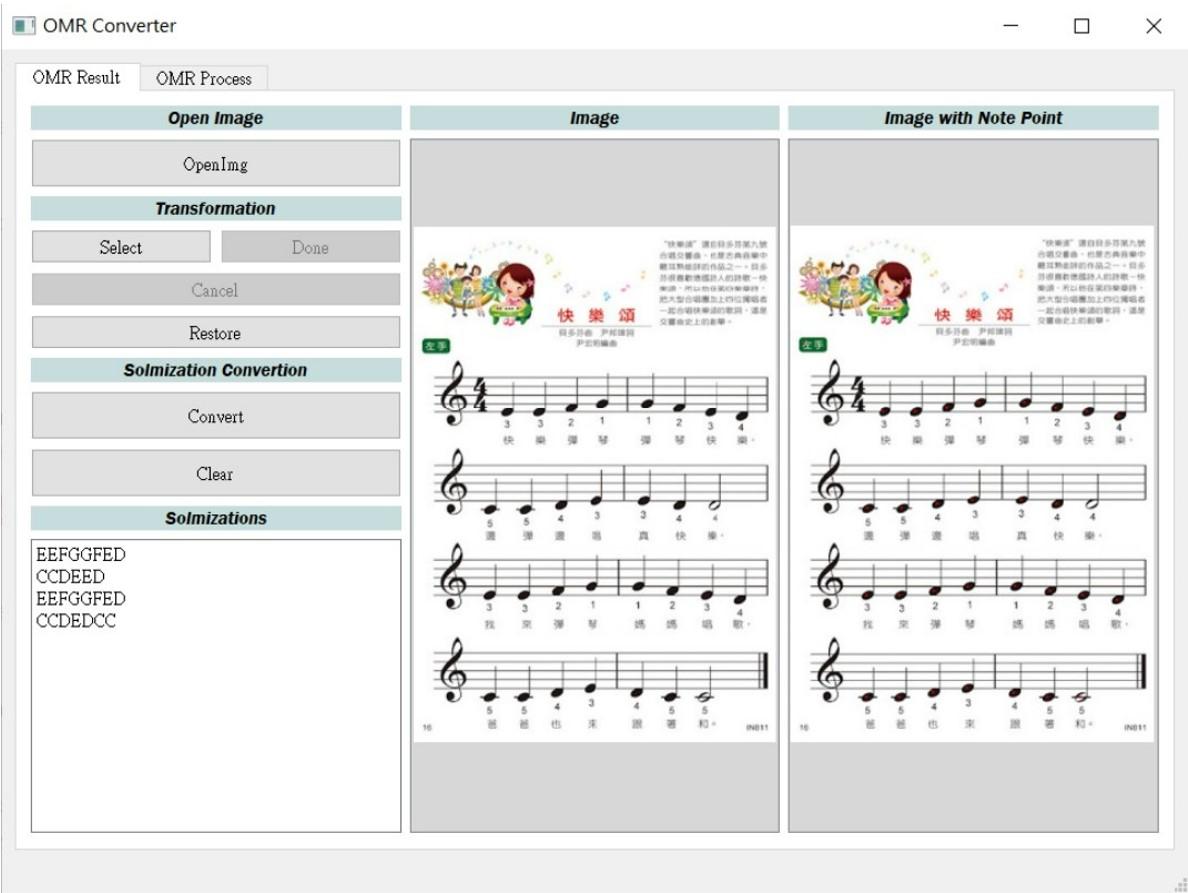
Converting Notes to Solmizations on the Music Sheet
Inspired by a powerful sheet music recognition app - notation scanner. In order to help people who aren't good at fast reading sheet music, this article describes the implementation details of the OMR(optical musical recognition) technique, which can be applied to converting notes on the sheet music to solmization. Additionally, a user interface also is designed for conveniently converting.
Senior
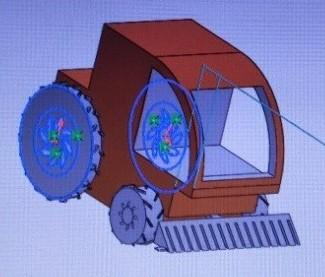
Automatic Truck
In this project, we are assigned to design an automatic truck from scratch to recognize the specified color ball and move this ball to its position which has the same color, which incorporates different topics, such as automatic control, the design of catching mechanism, sending data from raspberry pi to web and acquiring these data through the app in the cellphone.
Semester : 109-1
Course : Mechatronics and System Design-Mechatronics (4)
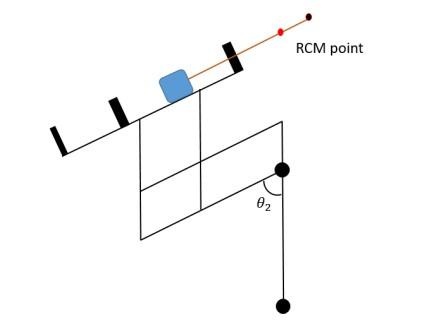
Analysis with RCM Mechanism System
In this Final Project, we want to analysis a robotic system with a remote center of motion(RCM) and design our digital controller- PD controller and state feedback poleplacement method by discrete and emulation method. And also, we try to analyze the performance by the different controller, design process and sampling rate.

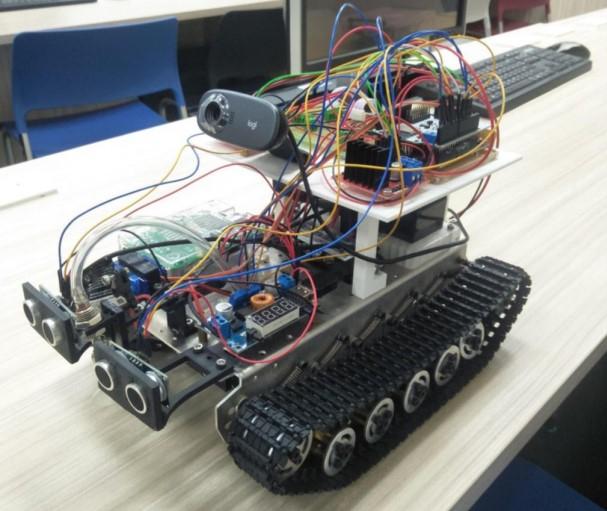
Adaptive Control of TMR with Unknown Slip Ratio
When it comes to controlling a tracked mobile robot, the longitudinal slippage of the left and right tracks can be described by two unknown parameters. In this project, we intend to use different adaptive laws and neural network methods to estimate these slippage parameters. To compare the performance of the different estimation methods, we use Simulink and python to construct simulation models. An empirical formula of slippage was used to simulate slippage. The final results are analyzed by the the RMS value of the trajectory tracking error.
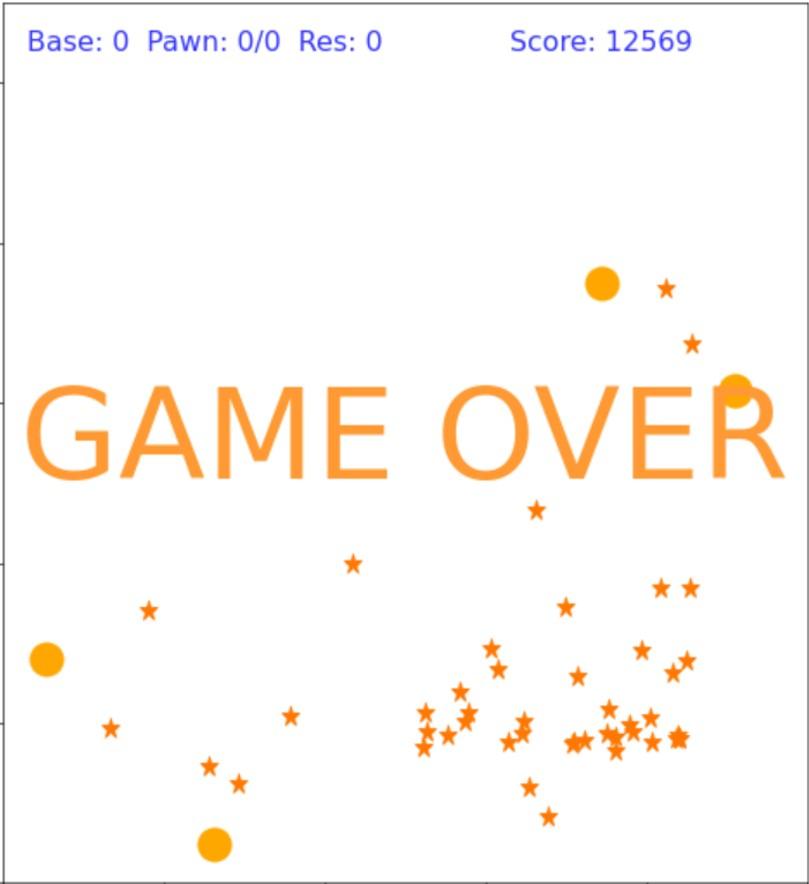
Tower Defense with RL
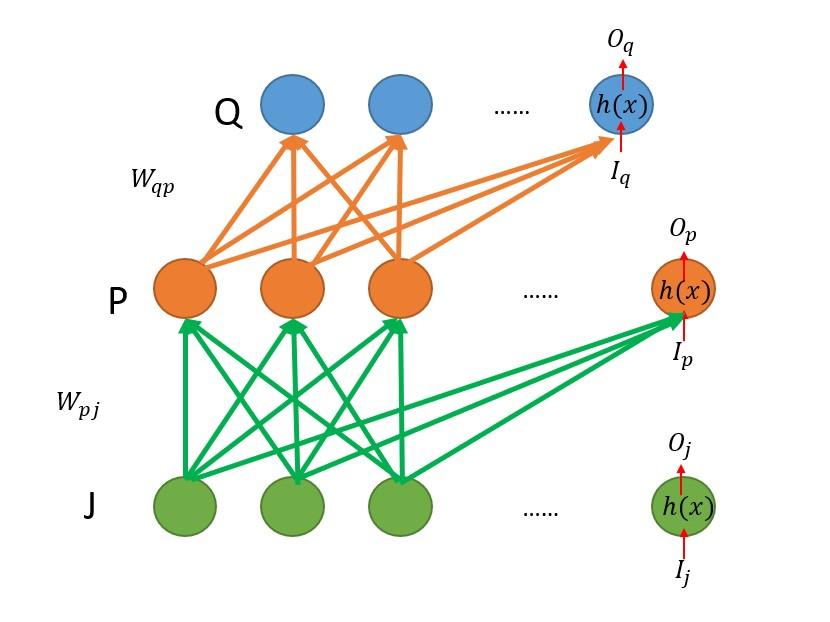
To get another "trophy" in this course, we need to get the top-three score in this tower-defense-like game. I try to train a neural network with reinforcement learning techniques and hope this NN can help me allocate the resource of my pawns to construct bases, get resources and fight with the enemies based on the game environment. Unfortunately, I didn't train a useful NN successfully due to my poor knowledgment of RL and nonproficient programming skills. What a pity.
Junior

PopKart
In order to analyze the influence of speed caused by the different appearances of cars in the well-known online racing game. We build three models of different cars, which are Brush, Burst, and Comfort, with solidwork and analyze the relationship between speed and appearance with flow simulation.


Automatic Catching Apple Truck
In this project, we built a truck that can identify green and red apples and catch them into the basket automatically. This truck is equipped with a camera - intel realsense d435 and a robot manipulator in order to draw everyone's attention in the 2019 Azalea Festival

Automatic Insert Hole Car
As a TA in this course, we are under very enormous pressure to be responsible for building the vehicles that are used in the final project. We are hard-working and totally built 7 vehicles from scratch for about 2 weeks straight. What a tremendous achievement without pay.

Heat Dissipation Analysis in Van
When in summer, the car will be heated into a pretty high temperature. In this final project, we try to figure out the best way to cool down the car from different status of windows, diagonal, front, back and all open, from the point of view of Heat Transfer

The Application of Synchronized Robot in Medication
In the OT field, it takes a lot of effort and time to diagnose the extent of patients' fingers' health. With the machine learning technique and some simple math principles, we can determine the finger's health very fast. We also built a robot hand to synchronize patients' hand movement (it seems useless so far though but cool)
Sophomore
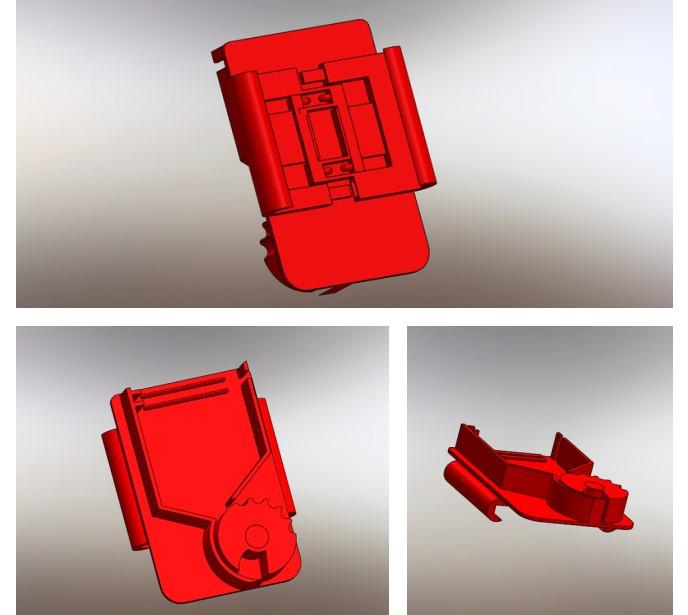
MED.DISPENSER X
Forgetting to take medicine has become a serious problem not only for the elderly but also for the middle-aged. We invent an unprecedented phone case including a pillbox and a telescopic shell that can adapt to any size of the cellphone, which can prevent people from forgetting to take medicine.
Freshman

Greenhouse Cowshed
The cow is a kind of temperate animal, yet most cows live in a place that isn't suitable for them. We dedicate to developing a system that can provide a better living environment for the cow in tropic or subtropic in this project.
